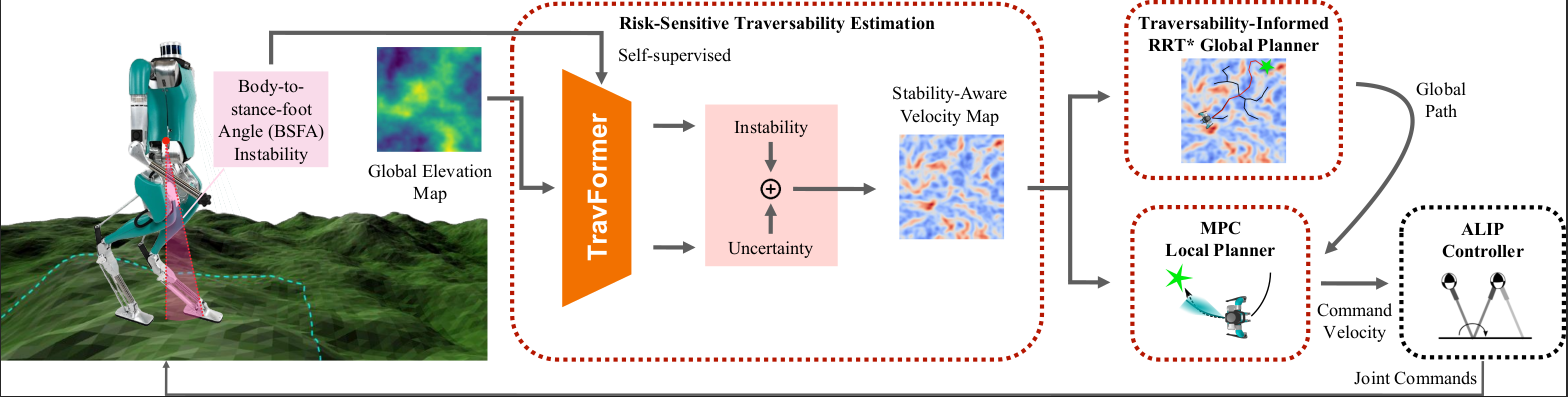
STATE-NAV: Stability-Aware Traversability Estimation for Bipedal Navigation on Rough Terrain
Venue: IEEE Robotics and Automation Letters (RA-L). Will be presented at ICRA 2026, Vienna
Ziwon Yoon, Lawrence Y Zhu, Jingxi Lu, Lu Gan, Ye Zhao

Venue: IEEE Robotics and Automation Letters (RA-L). Will be presented at ICRA 2026, Vienna
Ziwon Yoon, Lawrence Y Zhu, Jingxi Lu, Lu Gan, Ye Zhao
Venue: IEEE Transactions on Robotics (T-Ro), 2023
Ziwon Yoon, Joon-Ha Kim, Hae-Won Park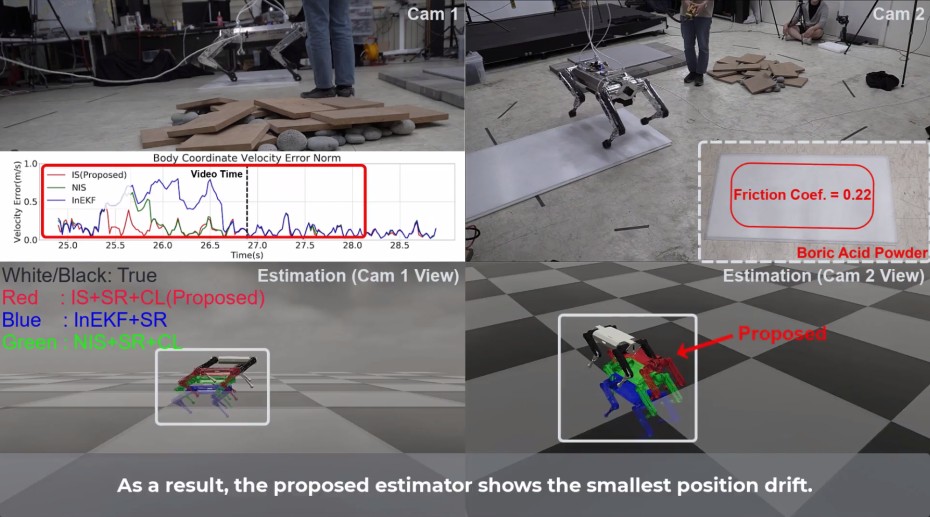
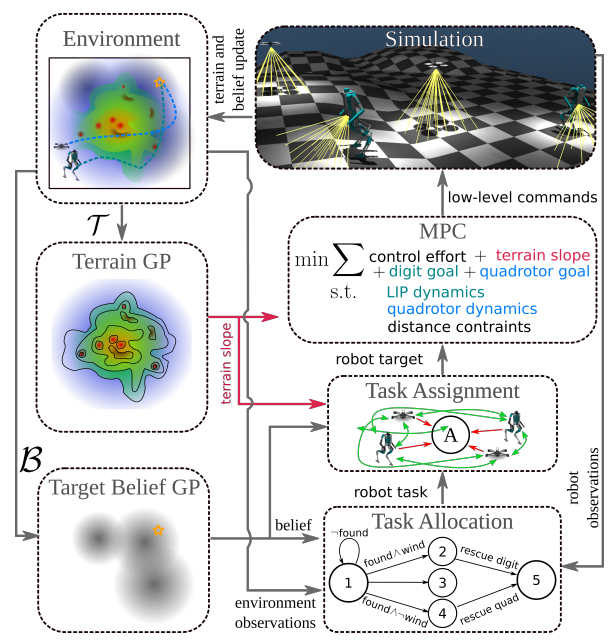
Venue: ICRA 2025
Abdulaziz Shamsah, Jesse Jiang, Ziwon Yoon, Samuel Coogan, Ye Zhao