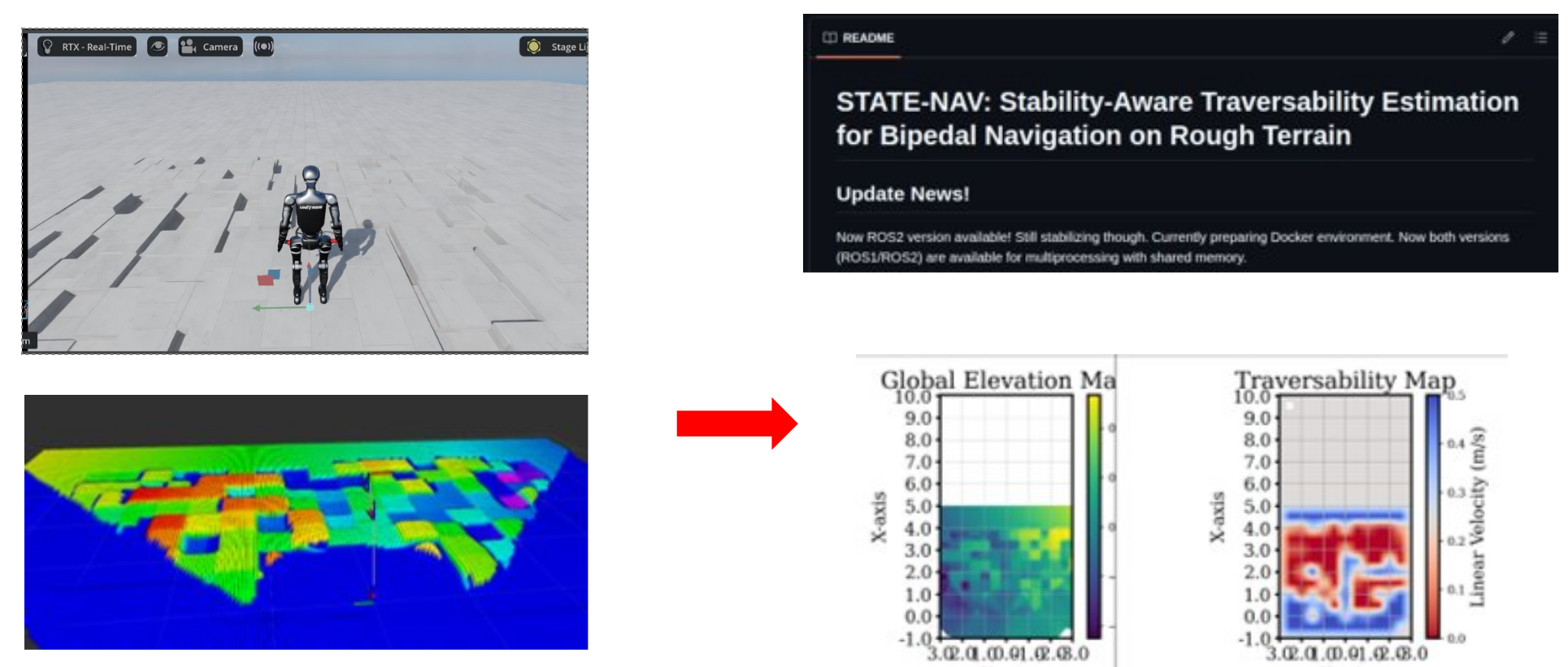
Harware-Isaac Sim integrated software codebase of bipedal robot system HECTOR
Developed an unified software codebase for running HECTOR robot in both Isaac Sim and real hardware, with my labmate Junnoske.

Developed an unified software codebase for running HECTOR robot in both Isaac Sim and real hardware, with my labmate Junnoske.
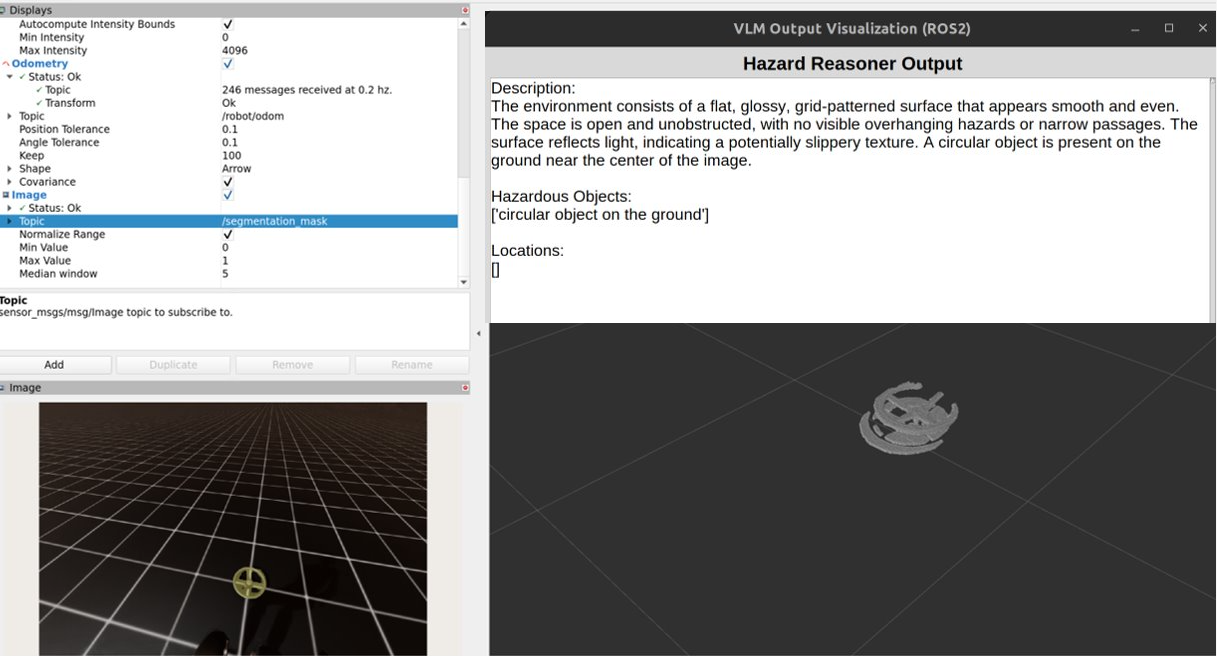
This is my new ongoing project. Using vision foundation models such as DINO, SAM and VLMs for semantic understanding of human-centered cluttered environment and outdoor terrain. Working on Isaac.