Harware-Isaac Sim integrated software codebase of bipedal robot system HECTOR
Developed an unified software codebase for running HECTOR robot in both Isaac Sim and real hardware, with my labmate Junnoske.

Developed an unified software codebase for running HECTOR robot in both Isaac Sim and real hardware, with my labmate Junnoske.
This is my new ongoing project. Using vision foundation models such as DINO, SAM and VLMs for semantic understanding of human-centered cluttered environment and outdoor terrain. Working on Isaac. 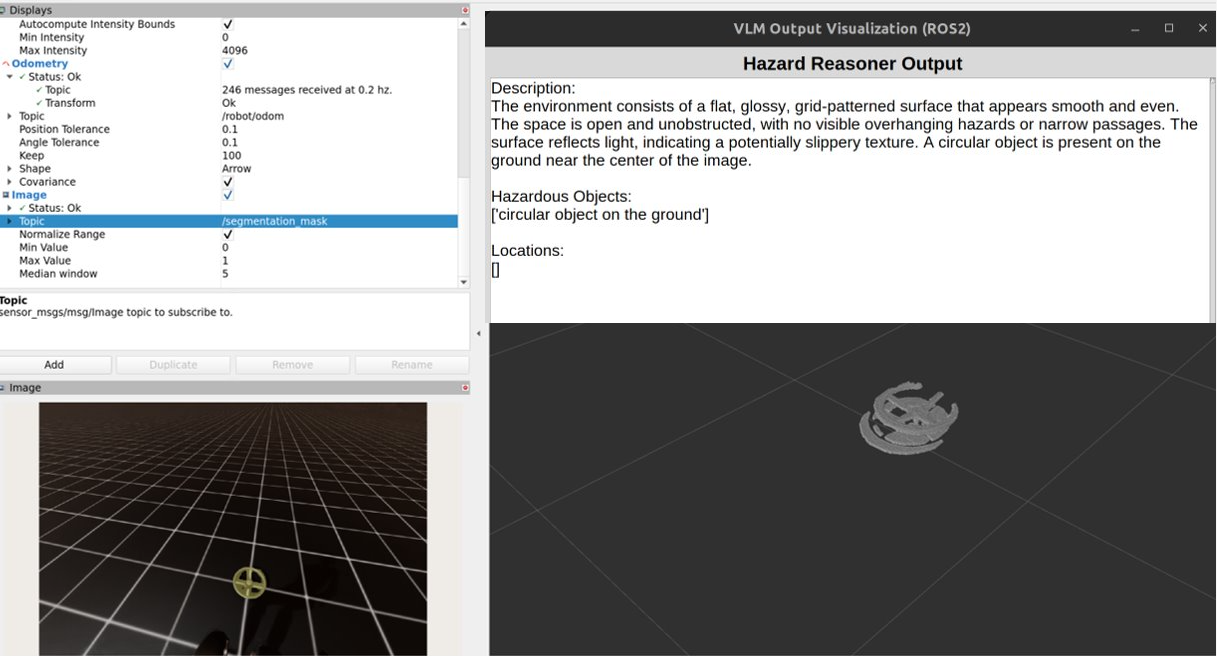
Venue: IEEE Transactions on Robotics (T-Ro), 2023
Ziwon Yoon, Joon-Ha Kim, Hae-Won Park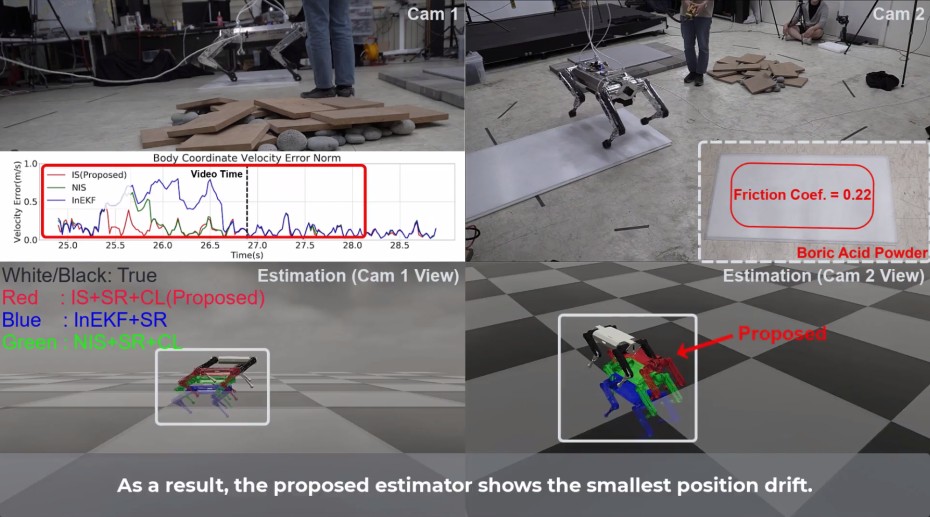
Venue: ICRA 2025
Abdulaziz Shamsah, Jesse Jiang, Ziwon Yoon, Samuel Coogan, Ye Zhao 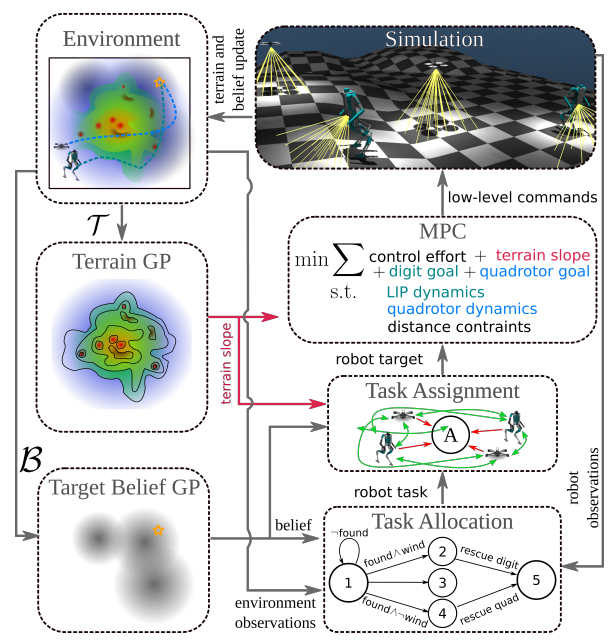
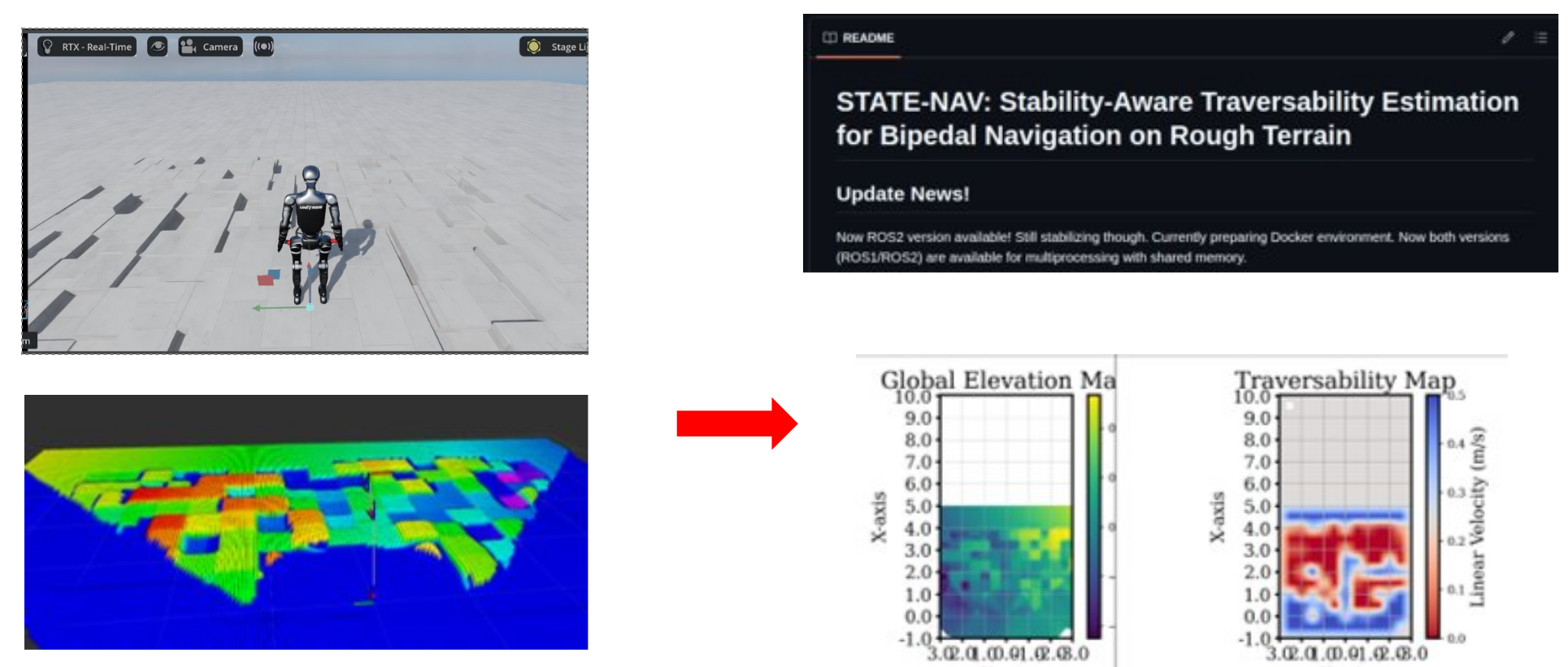
Venue: IEEE Robotics and Automation Letters (RA-L). Will be presented at ICRA 2026, Vienna
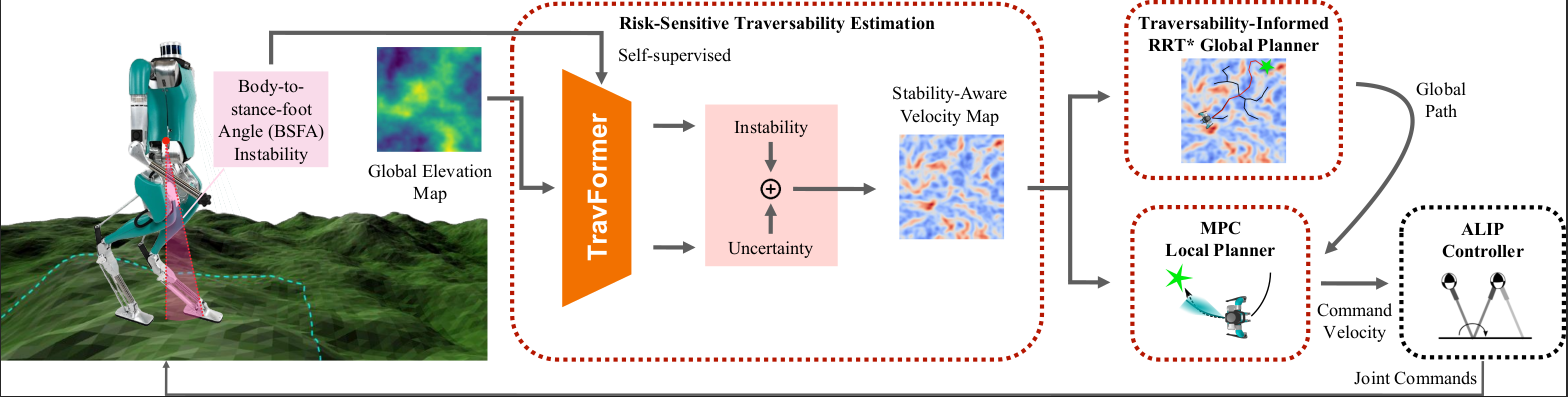
Ziwon Yoon, Lawrence Y Zhu, Jingxi Lu, Lu Gan, Ye Zhao
Published:
Phi mile 5K running challenge!
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.